HiPeR Lab
BACK: Navigation
The HiPeR Lab is located on the first floor of Etchverry. I am working in this lab over the Summer of 2018, also on the consequence aware drone project, but for the Summer Research Institute.
Thanks to Xiangyu Wu and Professor Mark Mueller for hosting me!
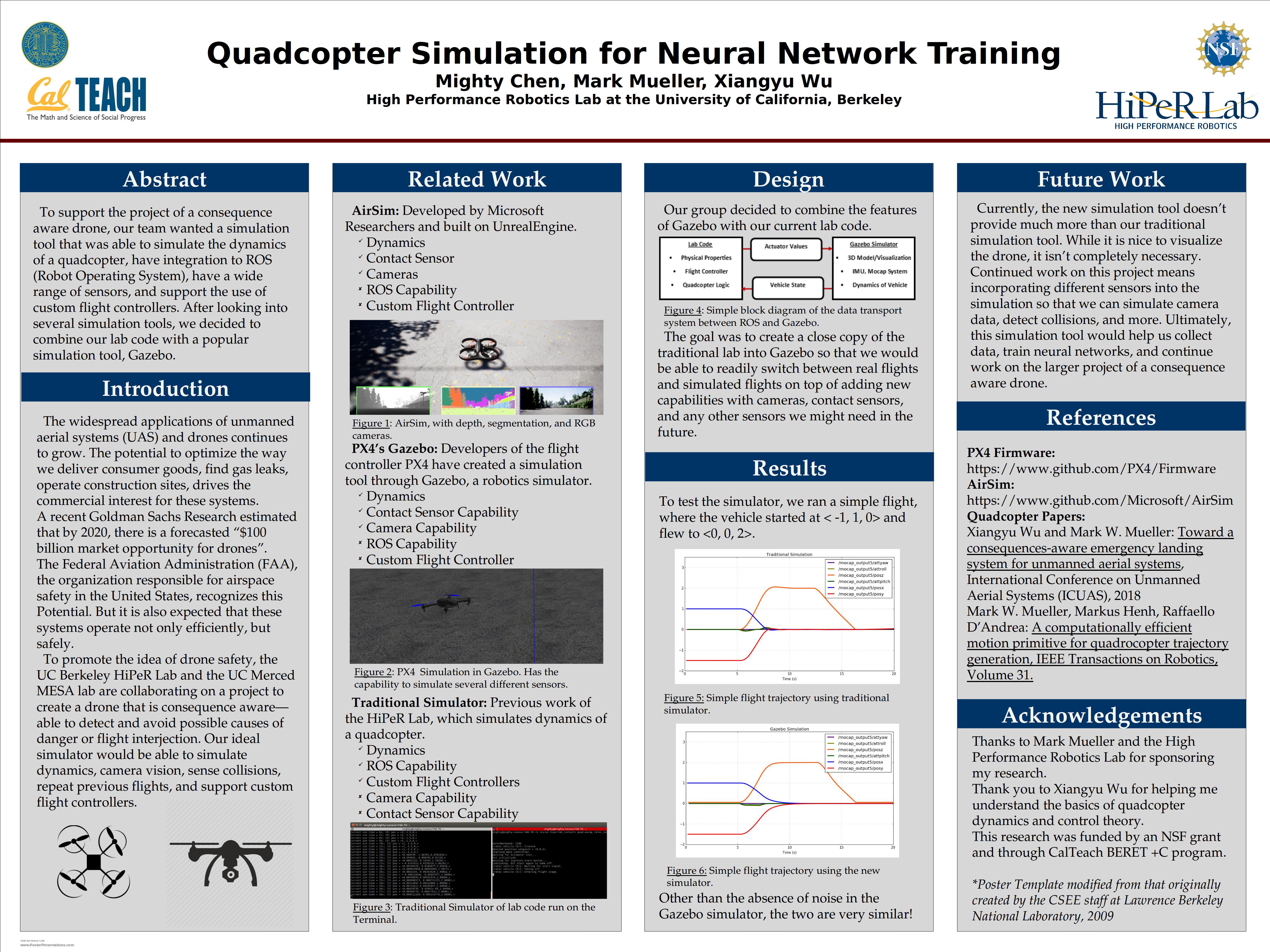
I worked on a project to integrate their Quadcopter Flight controllers to be compatible with Gazebo. Upsides of doing this: being able to simulate different sensors (contact, cameras, …), visualize the flights better, and simulate environments for the drone to fly in.
Link to Project here.
This is the poster for this project, which was part of my UGIS 189 class.