Plugins
BACK: Plugins
Here’s an example code for handling the ModelPlugin. You can find the Gazebo API here.
#include <functional>
#include <gazebo/gazebo.hh>
#include <gazebo/physics/physics.hh>
#include <gazebo/common/common.hh>
#include <ignition/math/Vector3.hh>
namespace gazebo
{
class ModelPush : public ModelPlugin
{
public: void Load(physics::ModelPtr _parent, sdf::ElementPtr /*_sdf*/)
{
// Store the pointer to the model
this->model = _parent;
// Listen to the update event. This event is broadcast every
// simulation iteration.
this->updateConnection = event::Events::ConnectWorldUpdateBegin(
std::bind(&ModelPush::OnUpdate, this));
}
// Called by the world update start event
public: void OnUpdate()
{
// Apply a small linear velocity to the model.
this->model->SetLinearVel(ignition::math::Vector3d(.3, 0, 0));
}
// Pointer to the model
private: physics::ModelPtr model;
// Pointer to the update event connection
private: event::ConnectionPtr updateConnection;
};
// Register this plugin with the simulator
GZ_REGISTER_MODEL_PLUGIN(ModelPush)
}
Be sure to add any new files to the CMakeLists.txt!
add_library(model_push SHARED model_push.cc)
target_link_libraries(model_push ${GAZEBO_LIBRARIES})
Let’s make a more complicated world to use this code with: a ground plane and a box.
<?xml version="1.0"?>
<sdf version="1.4">
<world name="default">
<!-- Ground Plane -->
<include>
<uri>model://ground_plane</uri>
</include>
<include>
<uri>model://sun</uri>
</include>
<model name="box">
<pose>0 0 0.5 0 0 0</pose>
<link name="link">
<collision name="collision">
<geometry>
<box>
<size>1 1 1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>1 1 1</size>
</box>
</geometry>
</visual>
</link>
<plugin name="model_push" filename="libmodel_push.so"/>
</model>
</world>
</sdf>
And don’t forget $ export GAZEBO_PLUGIN_PATH=$HOME/gazebo_plugin_tutorial/build:$GAZEBO_PLUGIN_PATH
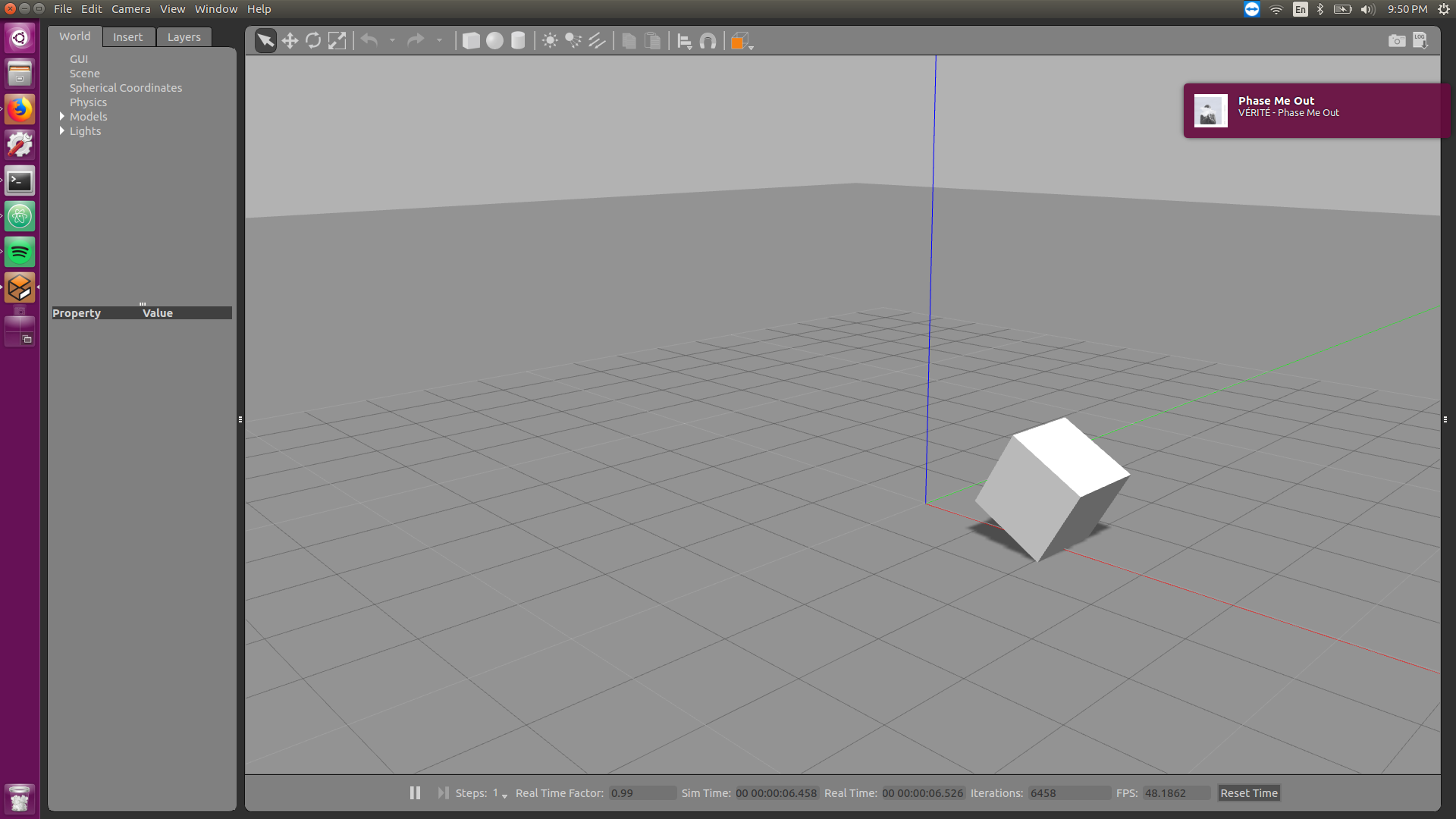
Start the simulation server with $ gzserver -u model_push.world (-u tells it to pause when you start the world)
And open the GUI with $ gzclient
You should get something like this: